Insegnamento di "Tecniche di Controllo e Diagnosi"
Corso al I e II anno della Laurea
Specialistica in Ingegneria Informatica e dell'Automazione (N.O.) al Dipartimento di
Ingegneria dell'Università di Ferrara
Programma del Corso
Il Corso vuole fornire, attraverso moduli di lezioni ed esperienze di laboratorio, le conoscenze di base su
alcuni aspetti metodologici del controllo avanzato e della diagnosi di più diffusa utilizzazione, con
applicazione nel settore industriale. Lo studente imparerà a conoscere ed utilizzare i tools di
progettazione assistita che potranno risultargli utili sia nello svolgimento della tesi di laurea che nell'esercizio
della professione. Vai alla
pagina del corso su UniFe.
Contenuti del Corso
Reti neurali: Introduzione alle reti neurali. Modello di reti
neurali. La funzione di attivazione. Reti neurali a strato singolo e multistrato
(MLP). Algoritmi di apprendimento. Reti neurali a base radiale
(RBF). Algoritmi genetici per l'ottimizzazione. Esempi di utilizzo e
di progetto di reti neurali. Identificazione di un modello dinamico
non lineare e controllore neurale. Stima e controllo ottimo per
sistemi multivariabili: Stima di variabili. Stima dello stato di
sistemi dinamici lineari in ambiente deterministico e
stocastico. Regolazione ed inseguimento: Controllo ottimo di sistemi
lineari su intervallo temporale finito ed infinito. Sistemi di
controllo non lineari. Richiami di teoria dei sistemi dinamici: modelli
non lineari e stabilità secondo Lyapounov. Panoramica delle tecniche di
controllo per sistemi nonlineari. Linearizzazione tramite
feedback. Controllo robusto a struttura variabile: Sliding
Mode. Teoria di base della logica fuzzy. Nascita e storia della logica
fuzzy. Confronto logica fuzzy e logica classica. Proposizioni e
inferenza deduttiva. Componenti principali di un sistema fuzzy:
fuzzificatore, motore d'inferenza, defuzzificatore. Applicazioni di
logica fuzzy nell'automazione. Diagnosi Automatica dei Guasti. Definizioni
e nomenclatura. Metodi di ridondanza analitica e fisica. Tecniche per la generazione
e la valutazione dei residui. Residui e sintomi di guasto. Il problema dell'affidabilità
e robustezza nella diagnosi. Integrazione tra diagnosi e controllo.
Esempi di tecniche di controllo avanzato e diagnosi applicate ad un
processo non lineare.
Prerequisiti
Il corso presuppone che lo studente abbia completato il percorso
formativo proposto per il Curriculum Automazione del corso di laurea
in Ingegneria Informatica e dell'Automazione.
Modalità d'esame
L'esame consiste in una prova orale, nella quale viene discussa
una relazione, precedentemente elaborata dallo studente attraverso
simulazioni in ambiente Matlab/Simulink di un problema di controllo
proposto dal docente, ed approfondite oralmente alcune delle tecniche di
controllo contenute nel programma del corso.
In particolare, la relazione, elaborata in autonomia dallo studente, presenta
i risultati delle simulazioni in ambiente Matlab/Simulink di un problema di
controllo proposto dal docente. I file Matlab/Simulink sviluppati devono essere
inviati in formato elettronico al docente, accompagnati da una relazione testuale
che descrive i risultati ottenuti e commenti personali sui grafici dei dati di
simulazione.
Quindi, ad ogni studente verrà proposto un modello dinamico non lineare da controllare
attraverso i metodi non lineari proposti nel corso, ovvero con le tecniche di feedback-linearization,
controllo ottimo, sliding mode, sistemi fuzzy e reti neurali. Per il sistema linearizzato dovrà
essere inoltre implementato un semplice schema di diagnosi, basato su osservatori identità e
filtri di Kalman. Infine, la relazione dovrà essere inviata ai docenti 3 giorni prima della prova orale.
La prova orale avrà come argomento alcune delle tecniche di controllo proposte nel corso,
sorteggiate tre giorni prima della prova orale, e comunicate via email dal docente, oppure eventualmente
in presenza dello studente. Nel dettaglio, verranno estratte a sorte un totale di tre tematiche, scelte
a caso tra: (1) non lineare o controllo ottimo (una tra le due), (2) reti neurali o sistemi fuzzy
(uno tra le due), (3) diagnosi automatica dei guasti (unica, obbligatoria).
Testi di Riferimento
Controllo Ottimo e Stima Ottima: "Progetto di sistemi di
controllo", M. Tibaldi. - 2. ed. - Pitagora, 1995.
Controllo Non Lineare: "Applied nonlinear control", J.J. Slotine, W. Li. - Prentice Hall, 1991.
Logica e Controllo Fuzzy: "A course in fuzzy systems and control", L.-X. Wang - Prentice Hall, 1997.
Reti Neurali: "Neural Networks for Identification, Prediction, and
Control", D.T. Pham and X. Liu - Springer Verlag, 1995.
Diagnosi Automatica dei Guasti: "Model-based Fault Diagnosis in Dynamic Systems Using Identification
Techniques", S. Simani, C. Fantuzzi, R. J. Patton - Springer, 2003.
Altri Testi Specifici
Neural Networks for Identification, Prediction, and Control, by Duc Truong Pham and Xing Liu. Springer Verlag;
(December 1995). ISBN: 3540199594.
Nonlinear Identification and Control: A Neural Network Approach, by G. P. Liu. Springer Verlag; (October 2001).
ISBN: 1852333421.
Fuzzy Modeling for Control, by Robert Babuska. Springer; 1st edition (May 1, 1998) ISBN-10: 0792381548,
ISBN-13: 978-0792381549.
Multi-Objective Optimization using Evolutionary Algorithms, by Deb Kalyanmoy. John Wiley & Sons, Ltd, Chichester,
England, 2001.
NONLINEAR VIRTUAL REFERENCE FEEDBACK TUNING: Application of Neural Networks to Direct Controller Design.
Document in PDF format (346KB).
Fault Diagnosis in Dynamic Systems: Theory and Application, by Patton R. J., Frank P. M., Clark R. N.
Hemel Hempstead, UK, Prentice Hall International, ISBN 0-13-308263-6, 602 pages: Series in Systems and Control
Engineering, August 1989.
Materiale Didattico: Lucidi delle Lezioni Teoriche (T), Laboratorio (L), e Dispense
T01: Introduzione al Corso (Silvio Simani).
Lucidi della lezione in formato PDF (1.6MB).
Lucidi della lezione in formato PDF, 2 per pagina (700kB).
T02: Richiami di Teoria dei Sistemi (Silvio Simani).
Lucidi della lezione in formato PDF (1.4MB);
Lucidi della lezione in formato PDF, 2 per pagina (1.3MB).
T1: Metodi di Controllo Non Lineare (Marcello Bonfè).
Lucidi della lezione in formato PDF (6.5MB);
Lucidi della lezione in formato PDF, 2 per pagina (2.1MB).
T2: Controllo Ottimo per Sistemi Multivariabili (Silvio Simani, Marcello Bonfè).
Lucidi della lezione in formato PDF (4.2MB).
Dispense in formato PDF, 2 per pagina (2.9MB).
Dispense in formato PDF (0.9MB).
T3: Stima Ottima per Sistemi Multivariabili - Filtro di Kalman: Teoria ed Esempi (Silvio Simani).
Lucidi della lezione in formato PDF (3.4MB);
Lucidi della lezione in formato PDF, 2 per pagina (3.5MB)
T41: Introduzione alla Logica Fuzzy (Silvio Simani).
Lucidi della lezione in formato PDF (3.3MB).
Lucidi della lezione in formato PDF, 2 per pagina (3MB)
T42: Sistemi Fuzzy per il Controllo (Silvio Simani).
Lucidi della lezione in formato PDF (6.8MB);
Lucidi della lezione in formato PDF, 2 per pagina (6.6MB).
T5: Reti Neurali per il Controllo (Silvio Simani).
Lucidi della lezione in formato PDF (2.2MB);
Lucidi della lezione in formato PDF, 2 per pagina (1.3MB).
T6: Diagnosi Automatica dei Guasti (Silvio Simani).
Lucidi della lezione in formato PDF (6.8MB);
Lucidi della lezione in formato PDF, 2 per pagina (6.6MB).
L01: Richiami di Matlab e Simulink in Laboratorio. (Silvio Simani).
Lucidi della lezione in formato PDF (260kB);
Lucidi della lezione in formato PDF (120kB)
L02: Files di introduzione all'utilizzo di Matlab e Simulink (Silvio Simani):
Script file per l'inizializzazione delle matrici;
Modello Simulink per la simulazione della retroazione stato-ingresso;
Modello Simulink per il progetto dell'osservatore dello stato;
Modello Simulink per la simulazione della retroazione stato-stimato-ingresso.
L1: Sperimentazione delle Metodologie di Progetto con Simulazioni ed
Esercizi di Approfondimento (Silvio Simani, Marcello Bonfè).
Lucidi della lezione in formato PDF (1.3MB);
Lucidi della lezione in formato PDF 2
per pagina (1.2MB)
L2: Files per le esercitazioni sull'esempio del pendolo semplice e pendolo inverso su carrello
(Silvio Simani): Dal pendolo semplice all'esempio del pend-cart - PDF file.
L3: Files per le esercitazioni sul regolatore SM e FL per il pend-cart (Marcello Bonfè e Silvio Simani):
Script file per l'inizializzazione del pendolo inverso su carrello;
Modello Simulink non lineare del pendolo inverso su carrello;
Script file per l'inizializzazione dei parametri dello sliding mode controller;
Modello Simulink col controllore non lineare per il pend-cart (con animazione);
Modello Simulink col controllore non lineare per il pend-cart (senza animazione);
Script file per graficare i risultati ottenuti (per il modello senza animazione);
Script file per graficare i risultati ottenuti in bianco e nero (modello senza animazione) .
L4: Files per le esercitazioni sul regolatore LQ per l'esempio del
pend-cart (Marcello Bonfè e Silvio Simani):
Script file per l'inizializzazione del pend-cart;
Modello Simulink non lineare del pend-cart;
Script file per l'inizializzazione dei parametri del regolatore LQ;
Script file per l'inizializzazione dei parametri del regolatore LQ con matrici;
Modello Simulink + controllore LQ per il pend-cart (con animazione);
Modello Simulink + controllore LQ per il pend-cart (senza animazione);
Matlab file per l'inizializzazione dei parametri del regolatore PID;
Modello Simulink + controllore PID per il pend-cart (con animazione);
Modello Simulink + controllore PID per il pend-cart (senza animazione);
Script file per graficare i risultati ottenuti (modello senza animazione);
Script file per graficare i risultati ottenuti in bianco e nero (modello senza animazione) .
L41: Files per le esercitazioni sul regolatore LQR/LQG e filtro di Kalman per l'esempio del
pend-cart (Marcello Bonfè e Silvio Simani):
Script file per l'inizializzazione del pend-cart;
Modello Simulink non lineare del pend-cart;
Script file per l'inizializzazione dei parametri del regolatore LQG;
Script file per l'inizializzazione dei parametri del regolatore LQ con matrici;
Modello Simulink + controllore LQR/LQG + KF per il pend-cart (senza animazione);
Script file per graficare i risultati ottenuti (modello senza animazione).
L5: Files per le esercitazioni sul controllore fuzzy per l'esempio del pend-cart (Silvio Simani):
Script file per l'inizializzazione del pendolo inverso su carrello;
Script file per l'inizializzazione del controllore fuzzy;
File Simulink del modello pend-cart;
Script file per l'inizializzazione del controllore di riferimento LQR;
File Simulink per la generazione dei dati;
File di simulazione del controllore fuzzy per l'esempio del pend-cart;
File ".fis" (fuzzy inference system) che contiene il modello del regolatore fuzzy;
File Simulink per la simulazione del regolatore fuzzy identificato con ANFIS;
Script Matlab per la generazione della struttura FIS con ANFIS;
Files FIS di esempio determinati con il programma ANFIS;
File PDF con le figure dello script Matlab e dei modelli Simulink.
L6: Files per le esercitazioni sul controllore neurale per l'esempio del pend-cart (Silvio Simani):
Script file per l'inizializzazione del pendolo inverso su carrello;
Modello Simulink non lineare del pendolo inverso su carrello;
Modello Simulink per l'analisi preliminare del sistema pendolo inverso su carrello;
Modello Simulink con controllore LQ;
Modello per la generazione dei dati per la rete neurale;
Modello per la simulazione della rete neurale;
Script file che prepara di dati per l'addestramento della rete neurale;
Script file per il training della rete neurale;
Script file per il progetto del regolatore LQ;
File PDF con immagini modelli Simulink e script per il progetto del
controllore neurale.
L7: Files per le esercitazioni sulla Diagnosi dei Guasti con filtro di Kalman per l'esempio del
pend-cart (Marcello Bonfè e Silvio Simani):
Script file per l'inizializzazione del pend-cart;
Modello Simulink non lineare del pend-cart;
Script file per il progetto del filtro di Kalman (con LQG);
Script file per l'inizializzazione dei parametri del regolatore LQ con matrici;
Modello Simulink + filtro di Kalman per FDI applicato al pend-cart.
L8: Files per l'esercitazione sul levitatore magnetico (Marcello Bonfè e Silvio Simani):
File PDF con la descrizione del progetto del levitatore magnetico (maglev);
File PDF con la presentazione del levitatore magnetico (maglev);
File con la visualizzazione del levitatore magnetico (maglev);
Script file per l'inizializzazione del maglev;
MAT file per l'inizializzazione del maglev (da caricare con load);
Modello Simulink non lineare del maglev;
Modello Simulink con il controllo FL + SM del maglev;
Matlab file per graficare i risultati dei regolatori;
Modello Simulink per la simulazione del controllo LQR del maglev;
Script file per il progetto del regolatore LQR;
Modello Simulink per generazione dati per il controllore neurale del maglev;
Script file per il training del controllore neurale per il maglev;
Modello Simulink per la simulazione del controllore neurale del maglev;
Modello Simulink per la generazione dei dati fuzzy del maglev;
Script file per l'organizzazione dei dati fuzzy per il maglev;
Simulink file per la simulazione del regolatore fuzzy;
Script file per caricare un regolatore fuzzy di esempio (Marcello Bonfè);
FIS file del regolatore fuzzy di esempio (Marcello Bonfè);
Modello Simulink per la simulazione del controllo LQR + LQG e diagnosi dei guasti;
Script file per il progetto del filtro di Kalman (LQG + diagnosi dei guasti);
L9: Esempio di relazione per l'esame di Tecniche di Controllo e Diagnosi: analisi del levitatore magnerico
(Silvio Simani): ESEMPIO di RELAZIONE - PDF file;
Guida alla relazione per l'esame di Tecniche di Controllo e Diagnosi (Marcello Bonfè):
Guida alla stesura della relazione - PDF file;
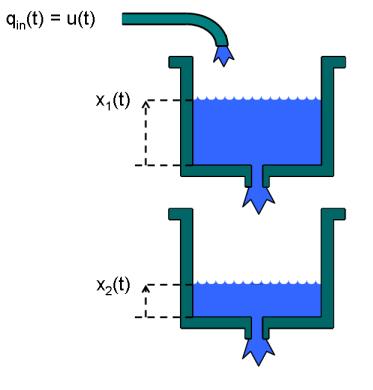
L10: Files per la prova d'esame: sistema di 2 serbatoi (Marcello Bonfè):
Script file per l'inizializzazione del sistema;
Modello Simulink non lineare del sistema;
Immagine del sistema;
Descrizione del sistema dei 2 serbatoi: dispensa in PDF;
Descrizione del sistema dei 2 serbatoi: lucidi in PDF;
-
{kind=link}
{kind=link}